When you connect a microcontroller to a sensor, display, or other module, do you ever think about how the two devices talk to each other? What exactly are they saying? How are they able to understand each other?

Communication between electronic devices is like communication between humans. Both sides need to speak the same language. In electronics, these languages are called communication protocols. Luckily for us, there are only a few communication protocols we need to know when building most DIY electronics projects. In this series of articles, we will discuss the basics of the three most common protocols: Serial Peripheral Interface (SPI), Inter-Integrated Circuit (I2C), and Universal Asynchronous Receiver/Transmitter (UART) driven communication.
First, we’ll begin with some basic concepts about electronic communication, then explain in detail how SPI works. In the next article, we’ll discuss UART driven communication, and in the third article, we’ll dive into I2C.
SPI, I2C, and UART are quite a bit slower than protocols like USB, ethernet, Bluetooth, and WiFi, but they’re a lot more simple and use less hardware and system resources. SPI, I2C, and UART are ideal for communication between microcontrollers and between microcontrollers and sensors where large amounts of high speed data don’t need to be transferred.
Serial vs. Parallel Communication
Electronic devices talk to each other by sending bits of data through wires physically connected between devices. A bit is like a letter in a word, except instead of the 26 letters (in the English alphabet), a bit is binary and can only be a 1 or 0. Bits are transferred from one device to another by quick changes in voltage. In a system operating at 5 V, a 0 bit is communicated as a short pulse of 0 V, and a 1 bit is communicated by a short pulse of 5 V.
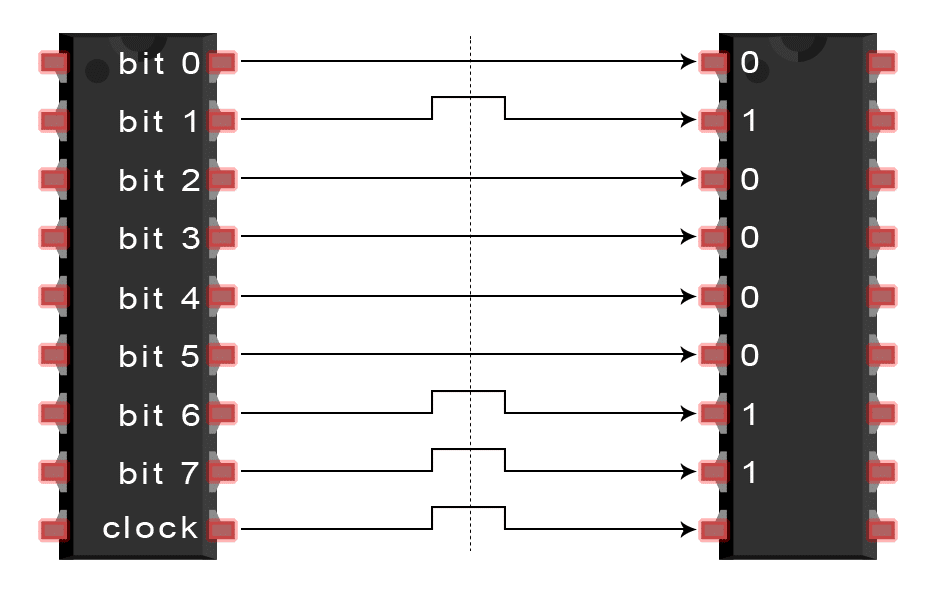
The bits of data can be transmitted either in parallel or serial form. In parallel communication, the bits of data are sent all at the same time, each through a separate wire. The following diagram shows the parallel transmission of the letter “C” in binary (01000011):
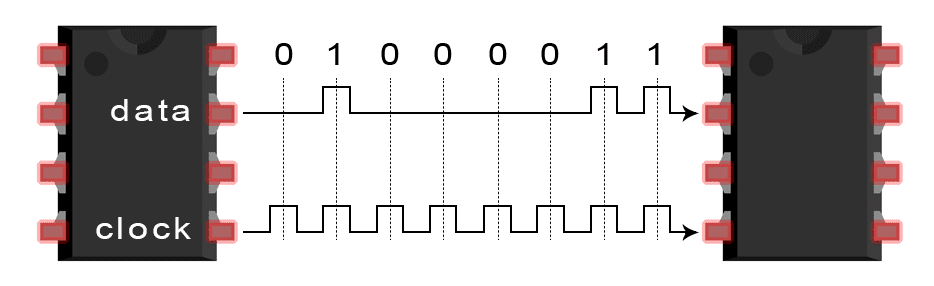
In serial communication, the bits are sent one by one through a single wire. The following diagram shows the serial transmission of the letter “C” in binary (01000011):
Introduction to SPI Communication
SPI is a common communication protocol used by many different devices. For example, SD card reader modules, RFID card reader modules, and 2.4 GHz wireless transmitter/receivers all use SPI to communicate with microcontrollers.
One unique benefit of SPI is the fact that data can be transferred without interruption. Any number of bits can be sent or received in a continuous stream. With I2C and UART, data is sent in packets, limited to a specific number of bits. Start and stop conditions define the beginning and end of each packet, so the data is interrupted during transmission.
Devices communicating via SPI are in a master-slave relationship. The master is the controlling device (usually a microcontroller), while the slave (usually a sensor, display, or memory chip) takes instruction from the master. The simplest configuration of SPI is a single master, single slave system, but one master can control more than one slave (more on this below).
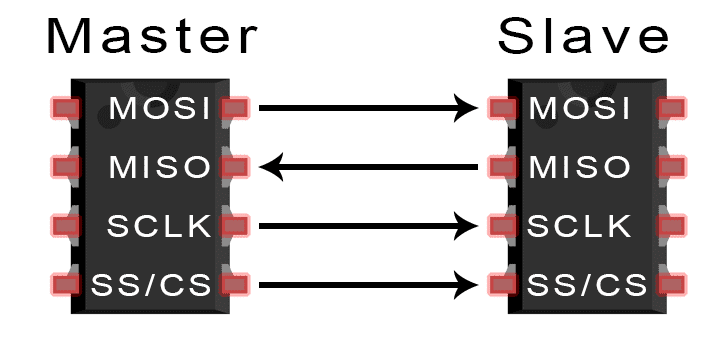
MOSI (Master Output/Slave Input) – Line for the master to send data to the slave.
MISO (Master Input/Slave Output) – Line for the slave to send data to the master.
SCLK (Clock) – Line for the clock signal.
SS/CS (Slave Select/Chip Select) – Line for the master to select which slave to send data to.
*In practice, the number of slaves is limited by the load capacitance of the system, which reduces the ability of the master to accurately switch between voltage levels.
How SPI Works
The Clock
The clock signal synchronizes the output of data bits from the master to the sampling of bits by the slave. One bit of data is transferred in each clock cycle, so the speed of data transfer is determined by the frequency of the clock signal. SPI communication is always initiated by the master since the master configures and generates the clock signal.
Any communication protocol where devices share a clock signal is known as synchronous. SPI is a synchronous communication protocol. There are also asynchronous methods that don’t use a clock signal. For example, in UART communication, both sides are set to a pre-configured baud rate that dictates the speed and timing of data transmission.
The clock signal in SPI can be modified using the properties of clock polarity and clock phase. These two properties work together to define when the bits are output and when they are sampled. Clock polarity can be set by the master to allow for bits to be output and sampled on either the rising or falling edge of the clock cycle. Clock phase can be set for output and sampling to occur on either the first edge or second edge of the clock cycle, regardless of whether it is rising or falling.
Slave Select
The master can choose which slave it wants to talk to by setting the slave’s CS/SS line to a low voltage level. In the idle, non-transmitting state, the slave select line is kept at a high voltage level. Multiple CS/SS pins may be available on the master, which allows for multiple slaves to be wired in parallel. If only one CS/SS pin is present, multiple slaves can be wired to the master by daisy-chaining.
Multiple Slaves
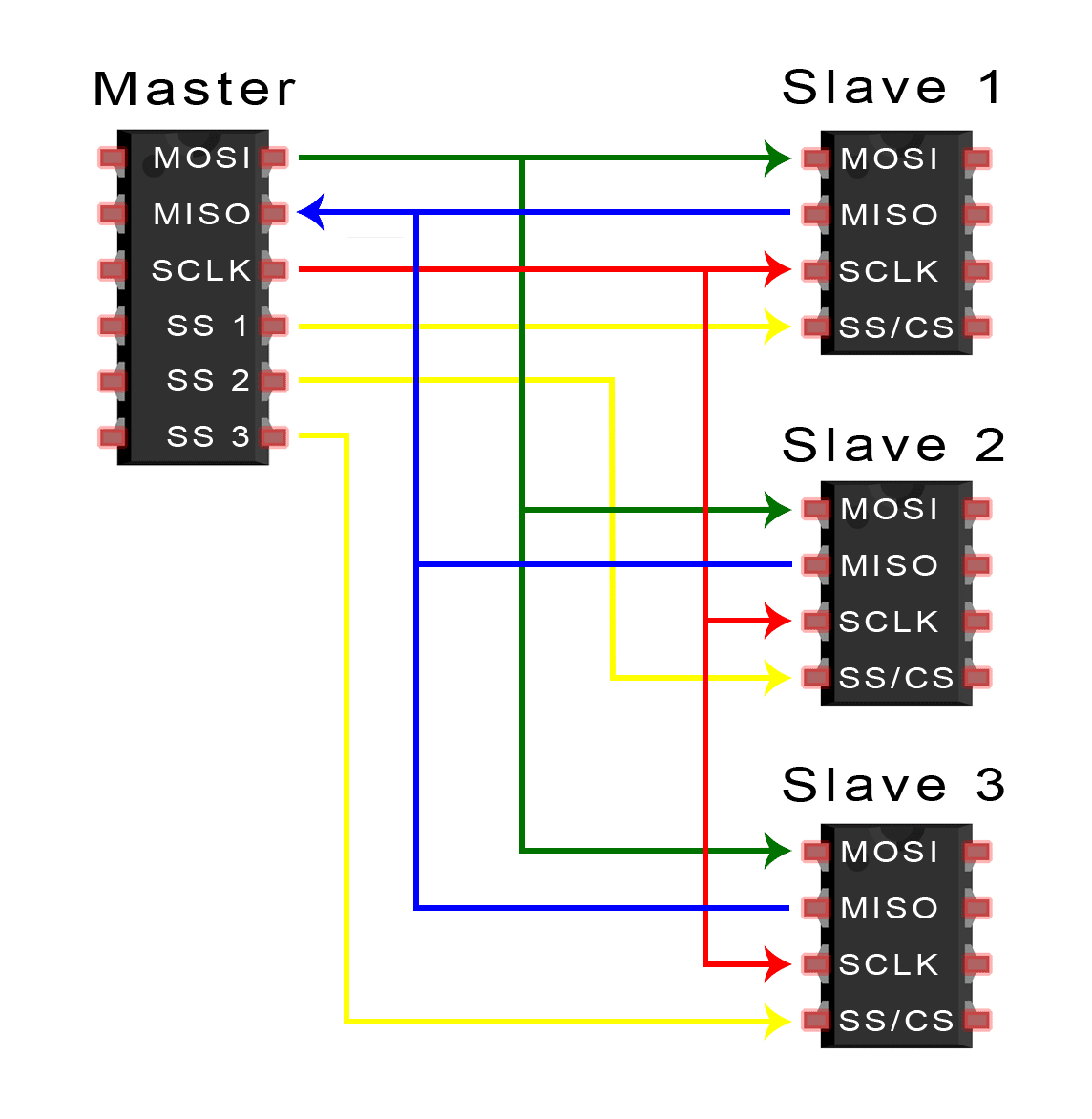
SPI can be set up to operate with a single master and a single slave, and it can be set up with multiple slaves controlled by a single master. There are two ways to connect multiple slaves to the master. If the master has multiple slave select pins, the slaves can be wired in parallel like this:
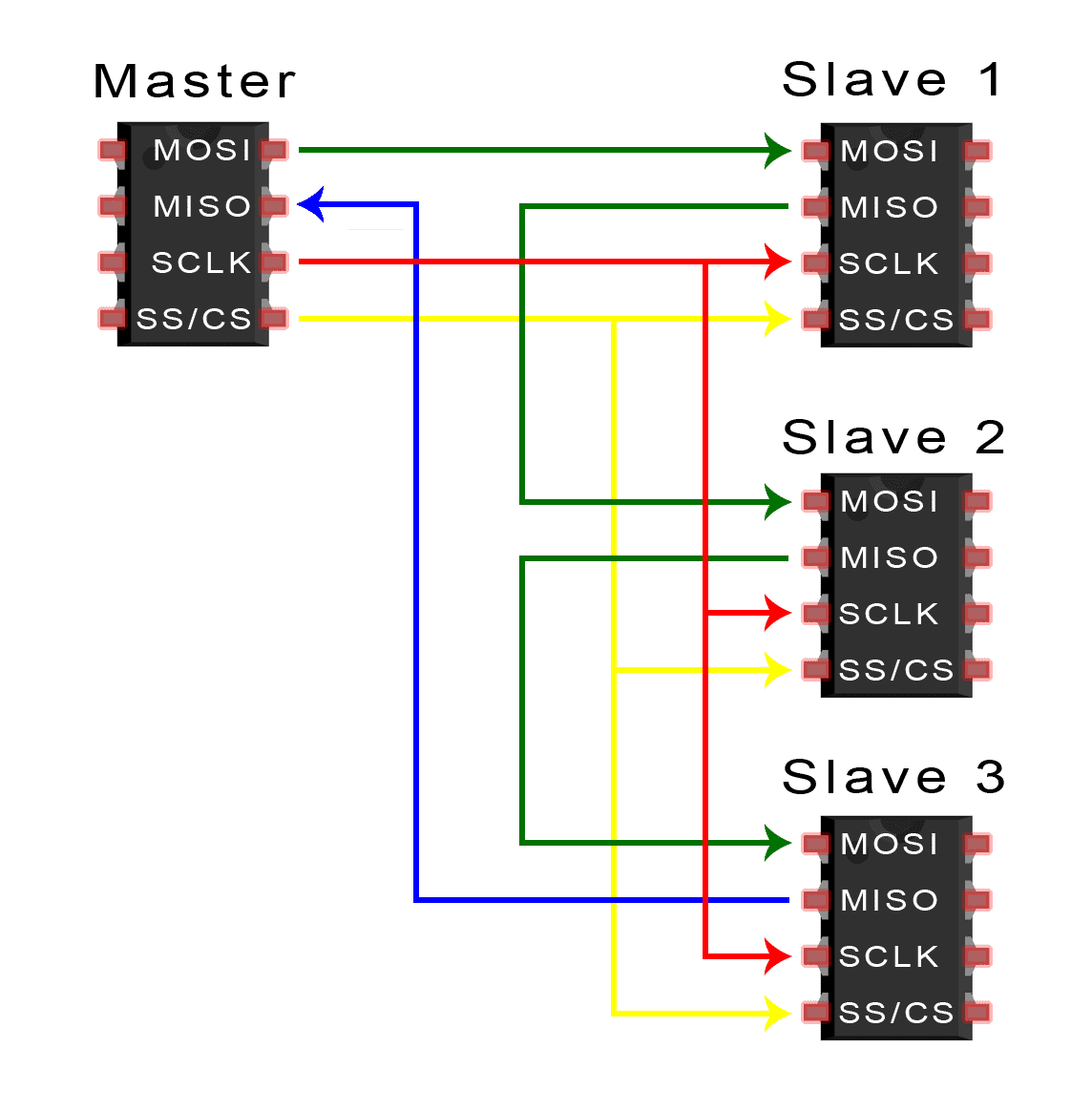
If only one slave select pin is available, the slaves can be daisy-chained like this:
MOSI and MISO
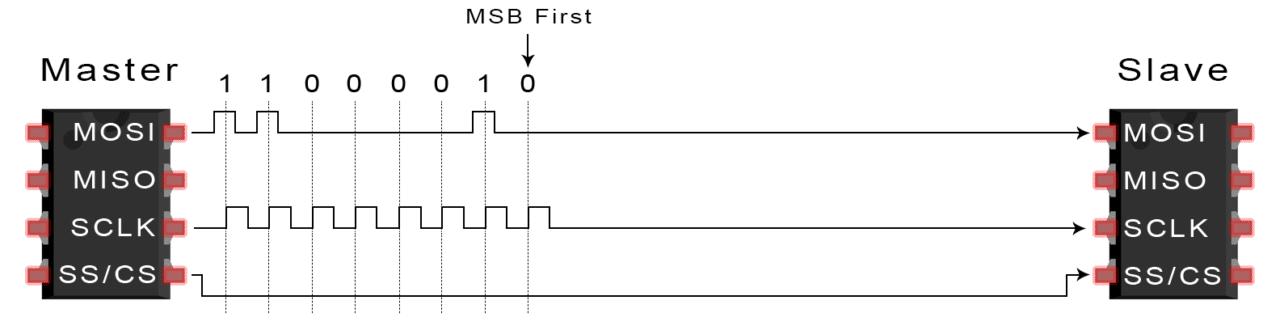
The master sends data to the slave bit by bit, in serial through the MOSI line. The slave receives the data sent from the master at the MOSI pin. Data sent from the master to the slave is usually sent with the most significant bit first.
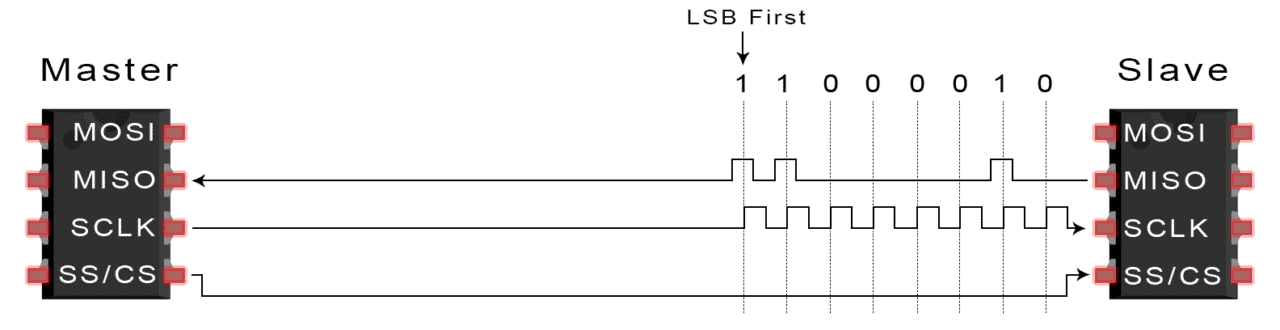
The slave can also send data back to the master through the MISO line in serial. The data sent from the slave back to the master is usually sent with the least significant bit first.
Steps of SPI Data Transmission
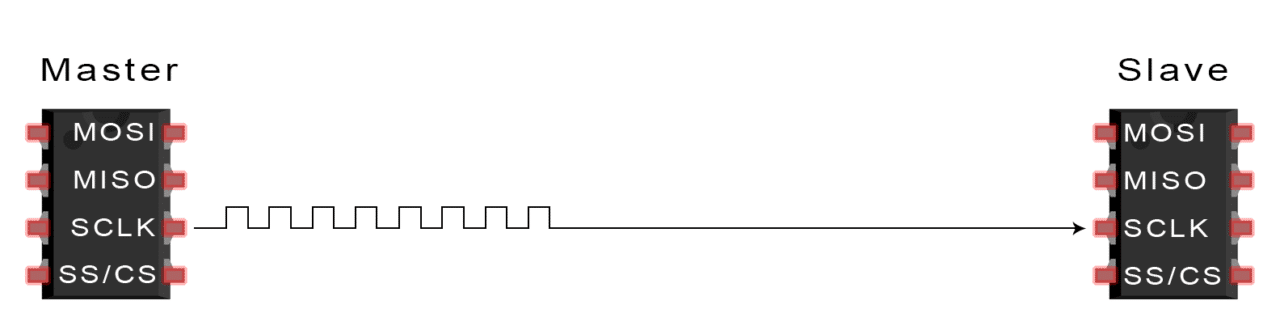
1. The master outputs the clock signal:
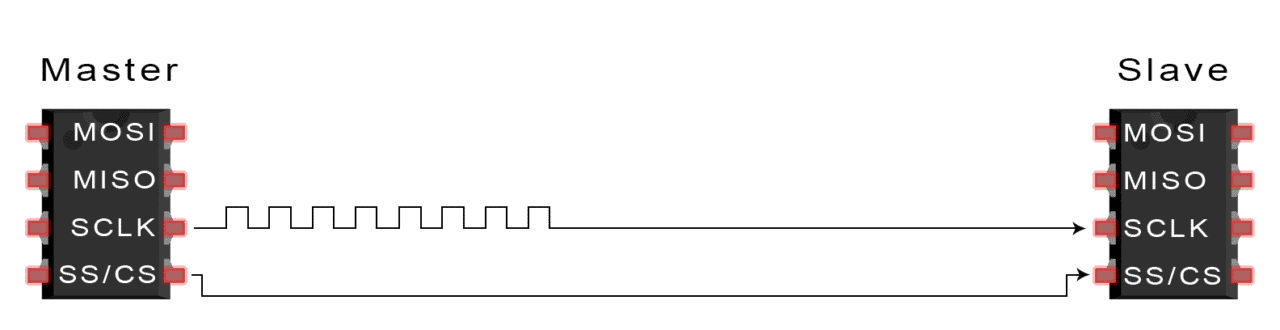
2. The master switches the SS/CS pin to a low voltage state, which activates the slave:
3. The master sends the data one bit at a time to the slave along the MOSI line. The slave reads the bits as they are received:
4. If a response is needed, the slave returns data one bit at a time to the master along the MISO line. The master reads the bits as they are received:
Advantages and Disadvantages of SPI
There are some advantages and disadvantages to using SPI, and if given the choice between different communication protocols, you should know when to use SPI according to the requirements of your project:
Advantages
- No start and stop bits, so the data can be streamed continuously without interruption
- No complicated slave addressing system like I2C
- Higher data transfer rate than I2C (almost twice as fast)
- Separate MISO and MOSI lines, so data can be sent and received at the same time
Disadvantages
- Uses four wires (I2C and UARTs use two)
- No acknowledgement that the data has been successfully received (I2C has this)
- No form of error checking like the parity bit in UART
- Only allows for a single master
Hopefully this article has given you a better understanding of SPI. Continue on to part two of this series to learn about UART driven communication, or to part three where we discuss the I2C protocol.
If you have any questions, feel free to ask it in the comment section, we’re here to help. And be sure to subscribe, we send out an email each time we publish new tutorials!



{kind=link}
Great post, thanks (:
Simple enough:)
Awesome and very well explained ! Can’t wait for part 2 and 3 :)
Excellent! Thanks!
Very nice and erudite explanation of what could be a confusing technical issue. I especially like the fact you brought up an answer many of us would have with this statement, “With I2C and UART, data is sent in packets”, making clear there is no header data along with encapsulation. Great Job.
Black Hack Wireless
Thank!!
how do the master know if there is data sent from slave? doesn’t there need to be clock signal sent by slave like master do to be synchronize the returning data?
Yono,
If you r talking about SPI then there is separate line called MISO. On this line slave will send the data. What and when do should send by slave which is mentioned in tje respective device datasheet…. All the cmunication details mentioned in the datasheet of slave device accordingly master need to send the command to slave. Clock is required for every bit which will be generated by master only.
or does the clock never stop even there’s no data sending/receiving?
Excellent explanation. Easy to understand specially for beginners.
all posts(for UART,SPI & I2C) are helpful
Very nicely explained in simple manner.
Thank you.
Thank you so much for this article.
Can somebody please explain how communication happens in daisy chained mode.
Good post, in a simple language and terms, where everyone can understand easily. But, i also want to know about the modes of operation in SPI. Have you explained that in a different post? Or can you add it?
good post
heuristic process of learning in simple way.
Thank you so much ^_^
keep going…simple explaining
Thank u so much for ur simple explanations.
how will the slave sense that the master is sending bit 1 or 0?
Good Article.. Simple :)
This article is written as an introductory part of communication protocols but there is a lot of comparison with other protocols before introducing to them. Otherwise one of the best i’ve found. Nice and simple!
If u will have coding with demo i will soooooooooooooooooo! good.Now itseif that like only having.Thank u soooooooo much.
how do the master know if there is data sent from slave? doesn’t there need to be clock signal sent by slave like master do to be synchronize the returning data?
I think the master expects a response from the slave and thus keeps on sending the clock signal (see arrow directions in illustrations) so the slave can timely send data bits back. This leaves the question how the master recognizes that response communication is beginnig as there may be zeroes at the beginning. Maybe response is expected immediately?
Spi Supports Multiple master’s
Hello! Nice article, but i think there is a small mistake in section “Steps of SPI Data Transmission” where step 1 should be step 2, and 2 should be 1 because the clock follows the chip select.
Have a nice day!
What is the maximum distance we can use this communication, minimum to maximum Data speed rate and How many slave we can communicate from master practically.
Doesn’t answer why they don’t make MOSI soup.
Amazing and succinct explanation! Thank You :)
Am I right to assume that the term “slave select” is actually wrong? Looking at the daisy-chaned components my understanding is that communication is only possible to all slaves at once. If not could you explain how one slave can be selected among others in the daisy chain?
the only website i have ever seen upto now on which i get the sufficient and better information regarding all communication protocols.
Aciu uz straipsni!
This is very helpful.., thank you very much..,
Great explanation. Quite simple and easy to understand.
Thanks alot
good explanation .
thanks a lot
Good explanation thank you so much
Thanks alto. So useful and practical !!
Thanks a lot. So useful and practical !!
Thanks for the post. Such a wonderful one
I have idea about that protocol after read this post thanks for this
Thanks for this very simple, brief intro. How does the master direct data to a specific slave in a daisy chain configuration? I think a few other people asked with no response. This should be more clear.
What is a “significant bit”?
Thanks!!
Thanks a lot for this explanation
easy to understand ….nice article tqyou….
Bright and clear explanations. I just would like to know how is the election of a specific slave possible in the daisy-chained shape or how is the desired slave be activated in preference to others ?
I have a doubt regarding the daisy circuit. Why the MISO of one slave connected to the MOSI of other slave? Shouldn’t all the MOSI come from the master to make the euivalent circuit as above that?
very well explained
Very well explained
Thank you for the detailed and clear explanation!
Comparing the 3 hardware protocol, only full duplex UART allows a slave device to send on it’s own some form of message telling the task is completed or a new event happened.
Both I2C and SPI need to use asynchronous polling to verify if the slave finished a task.
In case of SPI EEPROM, for example, there is a status register always available.
In case of I2C, many chip don’t answer anything when busy, exactly like if there was a hardware problem. Futhermore, when the I2C device finish, it come back on line at random time, including in the middle of any I2C activity. So, it can easily interpret data as new commands with unpredictable results.
You said in the advantage of SPI over I2C that it is almost twice as fast. Looking at typical datasheet, the maximum speed for both are:
I2C : 400 kilo bit per second
SPI : 20 mega bit per second as master, 4 mega bit per second as slave
There is a new version of I2C that read 800 k, but the equivalent generation SPI is 40 meg. This let me to believe that SPI is more than twice the speed of I2C.
Second comment is about the “SPI Step of transmission” where clock is shown as first step, Chip select as second step (but with clock starting after, like it should) and the answer from the slave in the 4th step.
The SPI is actually always full duplex, every bit sent by the master is accompanied by a bit answered from the slave.
The steps are:
Step #1: set chip select low
Step #2 start 8 clock pulse with the data 8 bit data (the slave is answering 8 bit at the same time)
Step #3 collect the 8 bit answer from the slave
->Loop to Step #2 as many times as needed for the message length
Step #4 set chip select high ; the slave then analyze the packet and execute whatever command it contained.
The answer from the slave is always one byte late compared to the master.
Nice and Great way to teach basics of SPI for beginners.
Very well explained! Thank you for the simple and neat points.
it is really good writing and help me out to understand communication and those pins. Thanks!
In SPI has any error checking options ? like if bits not received etc ?
Very nicely explained for an amateur, will definitely recommend this post for beginners!
Exceptionally well explained.
Thank you for the detailed and clear explanation.
If only one slave select pin is available, the slaves can be daisy-chained like this followed by figure as you showed.
In this if master make slave select pin low then it will be effect in all slaves, How it will identifies which salve?
Since there is no addressing associated with salve as in I2C protocol.
really dude, very well explained